
Page 36 - Website 119
P. 36
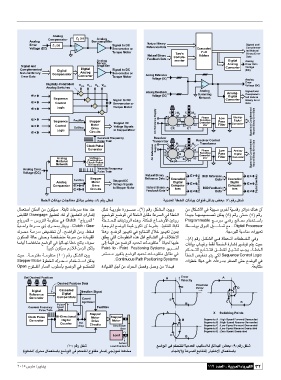
‰ULF²Ý« sJL*« s� ÊuJOÝ ÆÆW²ÐUŁ UŽdÝ …bŽ bMŽ q¦9 W?¹—uÞ …—u??� ÆÆ©π® r�— qJA?�« 5³¹Ë s� ‰UJý_« w� WMO³?� Èdš√ WO?L�— dz«Ëœ „UM¼ Ê√
iÐUI�« Disengage oOAFð p� Ë√ oOAF²� «—Uý≈ `O{u²� l{u�« w� QD)« qÐUI� WŽd��« w� QD)« Ϋb?Oł U?N?LO?L?Bð sJ1 ©∏® r�— v²?Š ©µ® r�—
ÃU¹dÐb�« ≠ ”Ëd²�« W�uEM� w� Clutch ¢ÃU¹dÐb�«¢ WKL?²?;« UMOðËd�« Ác¼Ë ÆWMJL*« ŸU?{Ë_« 5ðË— Programmable Z‡�d³� wL�— Z�U?F� «b�²‡ÝUÐ
…b?Š«Ë WŽd?Ý Í– „d?×0 —«b¹Ë ÆÆClutch - Gear WOFłd*« l{u�« WLO� ÊuJð Ê√ ◊dAÐ ÆÆcOHM²K� WKÐU� WD?Ý«uÐ ‰«Ëb�« qO???¦?9 l� ÆÆDigital Processor
„d?×� W?ŽdÝ iO?H�ð Ê√ ÆÆ`{«u�« s�Ë ÆjI?� «c¼Ë Æl{u�« dO?OGð w� lÐU²?²�« ‰öš dO?OGð ÊËbÐ ÆW−�d³K� W³ÝUM� «dO³Fð
ÊuJ��« W�UŠ v²?ŠË WCH?�M� WŽdÝ s� …œU?OI�« oKD¹ w²�« U�uEM*« Ác¼ q¦* ZzU ?²M�« w� ·ö²šô« ÆÆ©∏® r�— q?JA�« w?� …UDF?*« UDD?<« w�Ë
UC¹√ U?CH�M� l{u�« w� UOzU?N½ QDš Z²M¹ ·uÝ v�≈ WLO� s� l{u�« b¹b% U ?�uEM�¢ U½UOŠ√ UNOKŽ U½UOÐ »U?OžË jI� QD?)« …—Uý≈ dO?�uð r²¹ YOŠ
ÆΫdO³� ÊuJOÝ Â“ö�« s�e�« sJ�Ë Point- to - Point Positioning Systems Èd??š√ rJ‡×?²K� lÐU‡²?²*« o‡‡DM*« q‡O?¦9 V‡−¹ ÆÆQ‡D)«
YOŠ ÆÆW?Šd²I� W?�uEM� ©±∞® r�— qJA�« 5³¹ dL²�?� dOOG²Ð l{u�« b¹b% U?�uEM� qÐUI� w� QD)« iOH�ð r²¹ wJ� Sequence Control Logic
Stepper Motor …uD)« „d?×?� «b�?²?Ý« sJ1 ÆContinuous Path Positioning Systems «uDš W¾O¼ vKŽ UŽd�Ð dHB�« v²Š l{u�« w�
Open Õu²?H*« —U�*« »uKÝQÐ l{u�« w� r?JײK� …œUO?I�« qł√ s� „d;« qB�Ë q�Ë s� ôb?³� ÆWFÐU²²�