
Page 41 - Website 135
P. 41
W‡F?&d?� W‡¹c?Gð q‡L?Ž r²¹ YO?Š ÆÆÂUE‡M�« «c?N� W?I¹dDÐ ¢—u?²Ýd¹U?¦�«¢
¢u�Uð¢ b�u� «b�²ÝUÐ Speed Feedback WŽd‡�K� Continuous qB²*« —UO²�«
l� UNF?Lł r²¹Ë W³�UÝ W?O³DIÐË ÆÆTachogenerator r²?¹ YO???Š ÆÆCurrent
WO?³DIÐË ÆÆSpeed Setting W?Žd�?�« j³{ …—U?ý≈ d?O?šQ?²�« U¹«Ë“ j³?{
" U½ ÊuJ¹Ë ÆÆW ?×{u*« lO?L−²�« W?DI½ w� W³?łu� α2Ë α1 , wN????łu�«
r²¹ w²�« Speed Error WŽd��« QDš …—Uý≈ u¼ lL'«
α1 + α2 = ÊuJ¹ YO×Ð
u¼Ë Operational Amplifier (A1® d³J*« w� U¼d?O³Jð ÆÆW�U(« Ác¼ w�Ë Æ 180 o
j³C?� W�ËUI?� tÐ w³ÝUMð ¡e?ł tO?� UOKL?Ž d³J� , E2Ë E1 œuN?'« ÊuJð
ÆwK�UJð ¡ełË Proportional Gain w³ÝUM²�« V�J�«
W?ÝuJF?�Ë W¹ËU�?²?�
È“«uð Ë√ w�«uð W ?�ËUI?� l� UH?¦J� ÊuJ¹ U� …œU?ŽË WB?B�?²� WO?L�— U�u?EM� błuðË ÆProcessor W‡¹—«dL²‡Ý« vK‡Ž bŽU‡�¹ U2 „d×LK� —«Ëb�« uCF�«
Integral wK�UJ²�« V�J�« j³?{ w� Âb�?²�ð w²�«Ë rJ×?²*« q¦� W?�Uš WO?ŽUM� UOK?LF� Dedicated w�U²�UÐË Continuous Current „d‡‡;« w� —U‡‡O²�« fHM?Ð „d??;« U¼«d¹Ë
V�Š UO³ÝUMð W?Žd��« QDš …—Uý≈ dO³Jð r²¹Ë ÆGain W�U?{≈ v�≈ ÃU²?%Ë wNłu�« rJ?ײ�« w� …œu?łu� ”uJF*« È“«u²�UÐ „d;« vKŽ WK�u ?� UN½_ ÆÆWO³DI�«
…Ëd?F�UÐ rJ?×?²�« ÂUE½Ë Micro Controllers oO?�b�« W?OÐd?NJ�« W�U?D�« s� …œUH?²?Ýô«Ë tz«œ√ s� s�?×¹ «—U?Oð X³?� u¼ L UŁU?;« …bzU?�Ë ÆAnti-Parallel
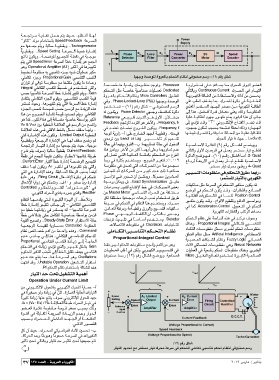
q�UJ²Ð wK�UJ²�« ¡e'« ÂuI¹Ë Æw³?ÝUM²�« V�J�« WLO� w�Ë Æ Phase-Locked-Loop (PLL) UON?łË …b�u*« vKŽ VKD�« nH?�¹ U0 ÆÆ„d?;« …dz«œ w� W½e?²?<« ÊS� Ϋd?Oš√Ë Æp�– oO?I×?²� „d;« …dz«œ v�≈ WŁU?×� UII×� X�u�« fH½ w�Ë ÆÆœœd²*« —bB*« v�≈ wJO½UJO*«
dL²�ð YOŠË ÆÆU¼d?O³Jð r²¹ w²�« WŽd��« QDš …—Uý≈ w½UFðô qBH�«Ë qO�u²�« ÂUEMÐ WO½Ëd²J�ù« ôu;« w� ÆÆÆÆÆ ¨ ±∏ ¨ ±≤ ¨ ∂ Vðd�« «– œuN?'« UO?I�«uð
Âb?�?²?�ð ≠ ©±±® r�— qJý ≠ w?�ËbMB�« rÝd�« ÍcG*« d?L²?�*« bN?'« —bB� s?� WOÐdNJ�« W?�UD�« YO?Š ÆÆ ôu;« Ác¼ 5�?�ð ÂbF� 5�u?;« s� q� „d×?LK� WF?�«b�« …uI�« Ê_ „d?×LK� ©WK�d?�® ÎU×?³�
¡e?'« V�?� W?L?O?� V�Š s?�e�« l� …œU¹e�« Ác¼ Long Dead Time q¹uD�« X?O*« s�e�« WKJA??� s�
t� Êu‡J¹Ë Phase Detector wN?łË n?ýU?� …dz«œ v�≈ «c¼ ÆÆqC?�√ …—b� q�U?F� wMF¹ p�–Ë W?�uEMLK� …—«Ëb‡�« «—UO‡?²�« s� …dOG?� W³�?½ —Ëd0 `L�¹ ÎUF³Þ WI¹dD�« Ác¼Ë ÆÁ—UO²� W ?³�M�UÐ WÝuJF� X׳�√
«c¼ s� ÃËd?)« …—Uý≈ WL?O� b¹b?% r²¹Ë ÆwK�UJ²�« œU?Lšû� “ö?�« s�e�« u¼Ë ¢ «—u²?Ýd¹U?¦�«¢ w�
Reference wF‡łd‡*« œœd‡²�« u‡‡¼ ‰Ë_« ÆÆÊö?‡šb� WO�UŽ W?O�UI²½« œuNł —u?Nþ lM1 œu¹«b�« «c¼ Ê√ V½Uł 5�u;« 5Ð WOI�«u²�« «—UO²�« s� Circulating Current w� W½e?²<« WOJO?½UJO*« W�UD�« „ö?N²Ý« s?� qC�√
u¼ UL� ÆÆd³J*« «c¼ v�≈ W�U ?C� WO�Uš WDÝ«uÐ d³J*« √b³¹ Ê√ œd?−0 t½_ ÆÆ¢—u²?Ýd¹U¦�«¢ —U?O²� wF?O³D�« WK�d?H�« WI¹dÞ w?� Àb×¹ U?L� W?O?ł—Uš W?�ËUI?�
Vin & Vout 5Ð WOD)« W?�öF�« w� rÝd�« s� `{«Ë Feedback l&d*« œœd²�« u¼ dšü«Ë ÆÆFrequency, f1 v�≈ ÍœRð b?�Ë ¢T¢ w½Ëd?²J�ù« ÕU?²H*« d?Cð b?� t?²�Ë c?šQ¹ ·uÝ ÆÆqO?�u²�« w� ¢—u?²Ýd¹U?¦�«¢ Æ ôu;« ÁcN� 4I*« —UO²�« s� •±∞ œËbŠ w� Ÿu‡M‡�« vL?�¹Ë ÆÆDynamic Braking W?OJO?�UM¹b�«
w� b?L²Fð U?C³½ ÃËd?)« ÊuJ¹Ë ÆFrequency, f
W?�öF�« Ác¼ w?� wI�_« j)UÐ q¦?2 nIÝ U?N�Ë ÆÆ œu‡N‡ł ÊuJ?ð V³�?Ð t×?²?� WE( p�–Ë Á—U?O?N½« V³�¹ U� u¼Ë ÆÆ Zero Current ÍdH� —U?O²� ¡UHÞû� qI?²�?� ŸuM�« s� W?�uEM*« Ác¼ ÊuJð Ê√ sJ1Ë Braking by w�‡‡J‡?F�« b‡‡O‡�u‡²�U?Ð `‡‡³J�« ‰Ë_«
w²�« …—U?ýù« Ác¼ ÊuJðË ÆÆLimited Output W?OD)« tłu�« W¹Ë«“ ≠√ ∫vKŽ ×U?)« bN'« W?O³D�Ë ÆÆt²L?O� UN‡²LO� „d‡;« …d‡z«bÐ La WŁU‡;« s� W‡O�UŽ WO�U‡I²½« wN?łu�« —U?O?²�UÐ W?O½Ëd²J?�ù« ôu;« Ê√ W�u?I?� Í√ w� t½√ Í√ ÆÆ Discontinuous Current qO?�u?²�« ÆÆW�UDK?� «dO�uðË W?OKŽU� d?¦�√ u¼Ë ÆÆRegeneration
WO?³DIÐË WOF?łd*« …—Uýù« w¼ U?N� nIÝ l{Ë - Íœœdð 5Ð Lead or Lag d?O?‡‡‡‡šQð Ë√ .b??Ið Æ„d;« —UOð ia YOŠ ÆÆ La dia/ dt ”u‡�?×� d?O‡‡‡šQð s‡�“ U‡N� ¢—u?²‡Ýd¹U‡¦�UТ Ê√ V−¹Ë ÆΫœdHM� qO�u²�UÐ b?Š«Ë ‰u×� ÂuI¹ WE( ÆUnder Torque Limit Âe‡F�« bŠ dOŁQð X% r²¹Ë
W‡F&d*« —U‡‡O²�« …—Uý≈ l� UNFLł r²¹ YOŠ ÆÆW³łu� W�UŠ w� ULNMOÐ ‚dH�« ≠» ∫ULN¹ËU�ð W�UŠ w� ‰ušb�« W?O?ÝU?Ý_« …d‡z«b�« ©π® r�— qJ?‡A�« `‡{u¹Ë V?ÝU?M?¹ô Significant Delay Time Constant dšü« v�≈ ‰u×� s� Changeover ‰UI²½ô« WOKLŽ r²ð
Õdý r²¹ ·uÝ® W³�UÝ WO³DIÐ Current Feedback «c¼ eOL²¹Ë Ædšü« s� d³�√ U ?LN¹√ vKŽË ULN¹ËU�ð ÂbŽ w½U¦�«Ë ‰Ë_« 5‡FÐd�« w� q‡LF¹ dL ?²�� —UOð l‡DI* WÐU−²?Ýô« UŽdÝ «– wÐdNJ�« dOO?�²�« U�uEM� ¡UH²�« W‡E?( s‡� WO½UŁ wKK� ≤∞ sŽ qI¹ ô s�“ bFÐ ¡«u??Ý ÆÆ¢»¢ Ë√ ¢√¢ 5²�U?(« w?� t½√ kŠö¹Ë
WDI½ w� lL'« W−O²½ ÊuJðË Æ©U?IŠô UNłU²½≈ WI¹dÞ v�≈ qBð w?²�« W?O�U?F�« W??�b�UÐ rJ×?²?�« s� ŸuM�« …dz«b�« `{u?O?� ÆÆ©±∞® r?�— qJA�« U?�√ Æ2- Quad ¢u�d��«¢ U?�d×� q¦� ‰UŽ wJO?�UM¹œ ¡«œ_ WO�UF�« ŸuM�« eO?L²¹Ë ÆÆ„d?;« w� ÍdH?� —UOð Detection «—u²?�U²½uJ�« WDÝ«uÐ „d;« W?¹cGð ·«dÞ√ fJFÐ
ÆÆCurrent Error —UO²�« QDš …—Uý≈ W?×{u*« lOL−²�« jЗ w� …d¦JÐ Âb ?�²�¹Ë ÆÆÃËd)« d?OG²* •∞[∞∞≤ ŸU‡Ð—√ W‡FЗ_« w‡� q‡LF¹ —U?‡Oð l‡DI* WO‡ÝU‡Ý_« ÆRobots w�ü« ÊU�½ù«Ë WO�ü« WOŽUMB�« UOKLF�« w� WŽd�Ð Continuous Current —UO²?�« q�«u²� ‰Ë_« —U?Oð fJ?Ž W�U?Š w� Ë√ Changeover Contactors
nIÝ U?N� ÊuJ¹Ë A2 d?³J*« w� U¼dO?³Jð r²¹ w²�«Ë W?�uEM� w� qL?Fð w²�« U?�d?;« s� W?ŽuL?−?� ÆdL²�� —UOð „d×� ÍcG¹Ë 4- Quad qO?�u²�« ÂUEMÐ W?O½Ëd²J�ù« ôu?;« Ê√ rždÐË ÆWHK²<« qOGA²�« ◊U/√ 5Ð ‰UI²½ô« Field Current w�?OÞU‡MG*« ‰U‡‡:« —U‡?‡Oð W¹c‡Gð
w²�« w¼ …—Uýù« Ác¼Ë ÆWIÐU ?��« WKŠd*« V³�Ð UC¹√ “ËU‡−²ð b� U‡�d;« s‡� d‡O³� œb‡Ž «– W‡OŽUM� UOKLŽ w� WOÐdNJ�« W�UD�« s� Ϋ¡eł pKN²�ð qBH�«Ë qO?�u?²�« WI¹d?DÐ WO½Ëd?²J�ù« ôu?;« ≠ » W?Žd?��« v²Š „d?;« `³?� r²¹ t½S?� ÆÆReversal
…œUŽ w¼Ë ÆÆ Firing Circuit ‰UF?ýù« …dz«œ w� rJײð s‡‡�«eð w‡� —Ëb‡‡ð Ê√ s‡ ?J1Ë ÆÆU�d?×� s¹dA?F�« Èd−¹ t½√ ô≈ ÆÆ Switching Losses qBH�«Ë qO�u²�« ∫∫ ∫ ∫ Switched-Mode Converters q‡‡BH�«Ë —UOð ÁU?&« ULMOÐ ÆÆW�d?(« ÁU&« fJŽ rŁ W¹d?HB�«
‰UFýù« U¹«Ë“ w� rJײðË ÆÆ·±∞Ë dH� 5Ð …—Uý≈ W−?�dÐ sJ1Ë qÐ ÆÆExact Synchronization o‡‡O�œ w¼Ë U?NO?� W�b?�²?�*« WO½Ëd?²J�ù« jzU?³M�« d¹uDð ÆÆwNłu�« rJ?ײ�« U�uEM* WK¹bÐ U?�uEM� w¼Ë ÆdOG²¹ ô XÐUŁ w½Ëd²J�ù« ‰u;«
Controlled Âu‡J;« Âu‡?‡I*« ¢ «—u?²?Ýd¹UŁ¢ w� U?Žd�?Ð —Ëb²� ÃU?²½ù« jš w� U?�d?;« iFÐ UMO�U?� q¦� WŽd��« w� rJ×?²�« dOG²?� ÊuJ¹ b� POWER —u²?Ýe½«dðË IGBT —u²?Ýe½«dð UÝU‡Ý√ »uOF�« s� U¼uK) WŽd�Ð dA ?²M¹ UN�«b�²Ý« √bÐ b�Ë ∫ Dual- Converter WOzU‡M¦�« WO½Ëd²J�ù« ôu;« ≠
ÆwÐdNJ�« „d;« ÍcG¹ Á—ËbÐ Íc�«Ë ÌÌRectifier sŽ Master Motor wÝU?Ý_« „d?;« sŽ WHK?²�?� l{u�« w� rJ×?²�« ÊuJ¹ b?�Ë ÆÆ «—UDI�«Ë l½U?B*« Transient qO‡�u??²�« W‡M�“√ q‡O?KI?²� MOSFET w� —U?Oð UO?I?�«uð ÃU²½≈ YO?Š s� U¼d?�– - w²�« ÆÆwN?łu?�« rJ×?²�UÐ ôu??:« Ÿ«u½√ b?Š√ u¼Ë
W?O?JKH�« UÐuJ�?K²�« w� U??L?� Position Control
ÂUEM�« U?N?�bI¹ w²?�« …dO?³J�« …e?O*« Ê√ ÆÆkŠö½Ë qJ� WHK²?�� WOF?łd� «œœdð V�½ «b�?²Ý« o¹dÞ dO?G²� ÊuJ¹ b?�Ë ÆÆÕ«u�_« lODIðË l�«b*« dO?Ý«u�Ë WO�UI?²½ô« ¡UHÞù« WM�“√Ë Turn-on & Turn-off Times W�UF� d?Ož …—bI� UN�ö?N²Ý« ÂbŽË WOÐd?NJ�« WJ³A�« ÊËbÐ W?FЗ_« ŸUЗ_« w� qOG?A²�« w� Âb?�²?�ðË
QDš …—U?ý≈ dO?³Jð V½U?ł v�≈ ≠ wK�UJ²�« w³?ÝUM²�« WŽd?Ý w� rJײ�« w� ÂUEM�« «c¼ Âb?�²�¹Ë Æ„d?×� w� UL� Acceleration Control qO−F?²�« w� rJײ�« W‡M�“_« Ác?‡¼ w� W‡JKN??²?�*« W‡?�UD�« q‡OKI??²� Load UNO� ÃËd)« œuNł Ê√ ÆÆp�– s� d¦�_«Ë ÆWO¦Š WO?³DI�« ”UJŽ≈ «—u²�U²½u?� «b�²Ý« v�≈ W?łU(«
l� UODš U?NðœU¹“ w� dL²?�¹ t½√ ≠ UO³ÝUMð W?Žd��« ÆÊœU?F*« WK�—œË WŽU?³D�«Ë ‚—u�«Ë ZO?�M�« UMO�U?� ÆWOÐdNJ�« «—UDI�«Ë »U�d�« bŽUB� Turn-on & Turn- W‡�U?š d‡ł“ d‡z«Ëœ «b�?²Ý«Ë ÊS� p�cÐË ÆÆU?N×O?ýdð qN�ð WO�U?Ž «œœd²Ð Side W½UO� v�≈ ÃU?²% UN½_ ÆÆChangeover Contactors
QDš výö?²¹ v²Š q�UJ²�« W?O�U?š WDÝ«uÐ s�e�« Phase w‡‡N??łu�« n‡ýUJ�« Ê√ ÆÆd‡�c�U?Ð d¹b‡‡łË Æ÷dG�« «c¼ fHM� off Snubbers s� w½U?Fð ô W�U?(« Ác¼ w� W?OÐd?NJ�« U?�d?;« p�c�Ë ÆÆUNÐ f�ö²�« ◊UI?½ q�Pð V³�Ð Í—Ëœ dOOGðË
WLOI�« `³BðË ÆÆ Steady-State Error —«dI²Ýô« W�UŠ «œœdð XO?³?¦ð w� ÎU?ÝU‡Ý√ Âb?�?²‡�¹ Detedor rJײ?�« ÂUE½ vKŽ WÝ«—b�« Ác¼ w� e?�d½ ·uÝË ‰u; WO?ÝUÝ_« …dz«b�« ©∏® r�— qJA�« `{u¹Ë Ác¼ W¹cGð sJ1Ë ÆWÐcÐc²*« ÂËe ?F�« Ë√ bz«e�« 5��²�« w�OÞUMG*« ‰U?:« —UOð ÁU&« fJŽ v�≈ WłU?(« ÂbŽ
W‡O?Fłd*« W‡L?OIK� W¹ËU‡?�� Controlled W�uJ;« Æ ôUBðô« U�uEM� w� Oscillators UÐcÐc‡²*« „UM¼Ë Æ Proportional Integral wK�UJ?²�« w³??ÝUM²�« lDI� vL�¹ U� Ë√ qB ?H�«Ë qO�u²�« ÂUEMÐ w½Ëd²J�« s� …d?ýU?³� W?O½Ëd?²J�ù« ôu?;« s� W?O?ŽuM�« dO?³� s�“ v�≈ ÃU?²×¹ t½_ Field Current Reversal
ÂUE½ hzU?Bš r¼√ s� …b?Š«Ë Ác¼Ë ÆÆCommand ¡U?�c�« U??�uEM� q¦??� Èd?š√ rJ% U??�uEM� ÆƉË_« lÐd�« w� qLF¹ DC Chopper dL?²�?� —UOð —bB� s� Ë√ WO� ?LA�« U¹ö)« Ë√ WOÐdNJ�« U¹—UD³�« U�d;« w� WO½UŁ wKK� µ∞∞ v�≈ qB¹ —UO²�« ”UJŽù
oDM*« ÂUE½ q¦?� Artificial Intelligence wŽUMD�ô«
Âb‡Ž V‡½U?ł v?�≈ «c¼ ÆÆwK�UJ²�« w³?ÝUM?²�« rJ×?²�« Proportional-Integral Control ÊuJ¹ Ê√ sJ1Ë BJT —u²?Ýe½«dð ¢T¢ q¦1 YOŠË WOŁöŁ œu¹«b�« U?�uI� ‰ö?š s� XÐUŁ dL²�?� —UOð Æ…dO³J�«
Proportional w³ÝUM²�« V‡�J�« …œU‡¹“ v‡�≈ W‡łU(« WO?³B?F�« UJ³‡A�« ÂUE½Ë Fuzzy Logic wÐU?³C�« …d‡z«bK� w½Ëd?²?J�ù« ÕU‡²?H*« q¦1Ë IGBT Ÿu½ s� bN'« rOFM²� dL²�� —UOð U×ýd� «b�²Ý«Ë tłË_« WOzUM¦�« WO½Ëd²J�ù« ôu?;« U�uEM� Âb�²�ðË
rJ×?²�« w� tðœU¹“ ÍœRð Íc�«Ë d?O?³?� qJAÐ Gain jI� fO?� rJײ�« U�uEM?� `$√Ë Âb�√ s� u¼Ë ¡«œ_« v�U??% U?�u?EM� w¼Ë Neural Networks d(« Ê«—Ëb�« œu¹«œ ¢D¢ q¦1Ë ÆÆElectronic Switch ÂU‡EMÐ ôu?‡;« Ác?N� t?²¹c?Gð q³?� d??L?²‡�*« W�d(« ÁU&« ”UJŽ≈Ë `³JK� —dJ²*« dOOG²�« ôUŠ w�
ÂuJ;« dOG²*« »cÐcð v�≈ QD)« qOKIð ·bNÐ w³ÝUM²�« U?OKL?F�« VKž√ w� sJ�Ë wÐd?NJ�« d?O?O?�?²�« w� UOKLF�« w� WOL?�— rJ% U�uEM� „UM¼Ë ÆÍdA³�« —Ëd� W¹—«dL²ÝUÐ ÂuI¹ YOŠ Free-Wheeling Diode ÆSwitched-Mode jýUI*« w� ‰U(« ULK¦� WOD/ WI¹dDÐ Ë√ ‰UŽ ‰bF0Ë
Âb?Ž tMŽ Z²M¹ U2 ÆÆUM¼ W?Žd?��« u¼Ë Oscillations UO�ËbM� ULÝ— ©±≤® r�— qJA�« `{u¹Ë ÆWOŽUMB�« Micro o‡O?�b�« Z�U‡F*« Âb�?²�ð …dO?³J�« WO?ŽUMB�« —UOð u¼Ë ¢T¢ —u²Ýe½«d²�« `²� bMŽ „d;« w� —UO²�« s�“ ÊS� ÆÆWO�U?Ž „d;« v�≈ ÃËd)« «œœdð Ê_Ë ÆÊœUF*« WK�—œ w�Ë W¹œœd²�« ‚—UD*«Ë dOýUM*«Ë
XN²½« b�Ë ÆUnstable Operation qOGA?²�« —«dI²Ý« …dz«œ WŁU?×� w� W½e?²<« W?OÐdNJ�« W?�UD�« s� " U½ wÐd?NJ�« wM�e�« X?ÐU?¦�« s� q�√ …œU?Ž ÊuJ¹ …—Ëb�«
ÆPI rJײ�« ÂUE½ «b�²ÝUÐ WKJA*« Ác¼ W?I?¹dDÐ W?�d??(« ÁU?&« ”UJŽ≈Ë `³?J�« r²¹Ë
U2 —«Ëb?�« u‡C???FK� sJ�Ë ÆÆq�UA� ÊËbÐ WK¹uÞ qOGAð «d²H�Ë WOJOðU²Ý«
WK‡B²� «—U‡‡Oð oI×¹ wzUM¦�« w½Ëd²J�ù« ‰u;« ÃU²×¹ YOŠ vKŽ√ UM¼ WHKJ²�«
Operation Under Current Limit Continuous Currents Æb?Š«Ë ‰u×?� s� ôbÐ w½Ëd²J�« ‰u?×� ≤ œb?Ž v�≈
s� w½Ëd?²J�ô« ‰u;«Ë wÐd?NJ�« „d;« W¹U?LŠ ≠√ WKJA?� w¼Ë ÆÆWODšË ÂUEMÐ UOzUMŁ UO½Ëd²J�« ôu×� ©∑® r�— qJA�« `{u¹Ë
w� …dOG� u�Ë …œU¹“ Í√ Ê_ ÆÆ…—UC�« WO�UF�« «—UO²�«
…dO³� …œU¹“ UNMŽ Z²M¹ ·uÝ w½Ëd²J�ù« ‰u;« bNł
ÆÆIa = (Va - Ea) / Ra W?�ö‡FK� UI?³Þ „d;« —U?Oð w�
uC?F�« …d‡z«œ W�ËU‡I?� W‡LO?� dG� V?³�Ð p�–Ë
…u?I�« w� WKÐU?I*« W?F¹d��« …œU?‡¹e�« Âb‡ŽË —«Ëb‡�«
V³‡�?Ð „d‡×?L?K� wK‡š«b�« b‡?N?'« Ë√ W??F‡�«b�«
Æw‡ð«c�« —u‡BI�«
q� Ê√ YOŠ ÆÆ„d ?×LK� wJO?�UM¹b�« ¡«œ_« 5�% ≠»
ÆÆW�d(« ¡bÐË ÎUÞu³¼Ë ΫœuF� W?Žd��« w� «dOOG²�«
dOŁQð X% w�U²�UÐË —UO²�« bŠ d ?OŁQð X% UNFOLł r²ð