
Page 38 - Website 145
P. 38
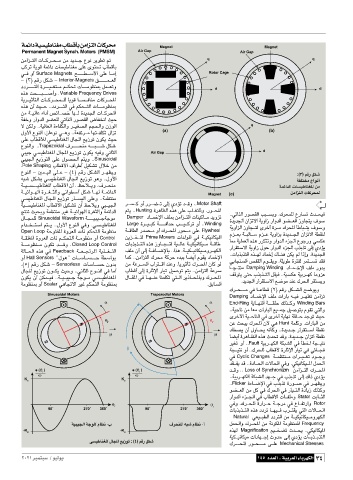
Permanent Magnet Synch. Motors (PMSM)
s�«e?²�« U?�d?×?� s� b¹b?ł Ÿu½ d¹uDð -
V�dð W¹u� WLz«œ U�OÞUMG� vKŽ Èu²% »UD�QÐ
w‡� Ë√ Surface Magnets `‡‡‡D?Ý_« vKŽ U?�≈
≠ ©≥® r�— qJý ≠ Interior-Magnets o‡‡‡‡L?F�«
œœd‡‡‡²�« …d‡‡O?G²?� r‡J% U‡‡�uEM0 qL?FðË
Ác¼ X×??³??�√Ë ÆVariable Frequency Drives
W¹d?OŁQ²�« U?�d?×L?K� U¹u� U?�?�UM� U�d?;«
Ác¼ Ê√ YO?Š ÆÆœœd??²�« w� rJ×?²�« U??�uEM0
s� W?O�UŽ ¡«œ√ hzU?Bš UN?� …b¹b'« U?�d;«
WHšË —«Ëb�« uCFK� wð«c�« —uBI�« ÷UH�½« YOŠ
ô sJ�Ë ÆÆWO�UF�« …¡UHJ�«Ë d?OGB�« r−(«Ë Ê“u�«
‰Ë_« ŸuM�« ∫ÊUŽu½ w?¼Ë ÆÆWFHðd?� UN²?HKJ𠉫eð
vKŽ »UD�ú� w�OÞUMG*« ‰U:« l¹“uð ÊuJ¹ YOŠ
ŸuM�«Ë ÆÆTrapezoidal ·d‡‡?×M� t??³??ý qJý
w³Oł w�OÞUMG*« ‰U:« l¹“uð ÊuJ¹ tO�Ë w½U¦�«
w³O'« l¹“u²�« vKŽ ‰uB(« r²¹Ë ÆÆSinusoidal
ÆPole Shaping »UD�_« ·«dÞ√ qOJAð ‰öš s�
ŸuM�« ≠ 5L?O�« vK?Ž ≠ ©¥® r�— qJA�« d?NE¹Ë
t³ý qJAÐ w�OÞUMG*« ‰U:« l¹“uð u¼Ë ÆƉË_«
W?O?�??OÞUMG*« »UD�_« Ê√ ÆÆkŠö?¹Ë Æ·d?×M�
W?Oz«u?N�« …d?G?¦�«Ë w½«uDÝ√ qJý U?N� W?Lz«b�«
w�OÞUMG*« ‰U:« l¹“uð —U?�O�« vKŽË ÆÆWLE²M�
WO?�OÞUMG*« »UD�_« qOJAð Ê√ kŠö¹Ë w³?O'« d?�?� Ë√ —d?C?ð v�≈ ÍœRð b?�Ë ÆÆMotor Shaft
Z²Mð YO×ÐË WLE²M� dOž W?Oz«uN�« …dG¦�«Ë WLz«b�« r²¹ ÆÆHunting …d¼UE�« Ác¼ vKŽ VK?G²K�Ë Æ—u?;« ÆÆwð«c�« —uBI�« V³?�ÐË Æ„d×LK� Ÿ—U�ð Àb?×O�
‰U‡−LK� Sinusoidal Waveform W‡‡‡O³O‡łWłu� Damper œU?Lšù« nK0 s�«e?²�« UMO�U?� b¹Ëeð …b¹b'« Ê«eðô« W¹Ë«“ —«Ëb�« uC ?F�« “ËU−²¹ ·uÝ
«b?�?²Ý« r²?¹ ÆƉË_« ŸuM�« w�Ë Æw�?OÞUMG*« Large …d‡O?³� W‡‡?�«bŠ V‡‡O?�dð Ë√ ÆÆWinding W¹Ë«e�« “ËU−?²� Èdš√ …d?� „d;« QÞU³?²¹ ·uÝË
Open Loop WŠu²H*« …ËdF�« «– rJײ�« W�uEM� W?�UD�« —bB?� Ë√ „d?;« —u×?� vKŽ Flywheel Âe?FÐ W?³�U?Ý Âe?Ž W¹Ë«eÐ …b¹b?'« Ê«eðô« WDIM�
W?IKG*« …ËdF�« «– r?Jײ�« W?�uEM� Ë√ Control s¹e?�?²� Prime Movers «b�u*« w� W?OJO½UJO*«
W??�uEM?� ÊuJð b??�Ë ÆClosed Loop Control UÐcÐc?²�« Ác¼ “ËU?−?²� WO?�UŽ W?OJO½UJO?� W?�UÞ U2 WOKLF�« Ác¼ —dJ²ðË —«Ëb�« ¡e'« Ÿuł—Ë w�JŽ
—«dI²Ýô« W¹Ë«“ ‰uŠ —«Ëb�« ¡e'« »cÐcð v�≈ ÍœR¹
W�U?(« Ác¼ w� Feedback W?F?&d*« W¹c?G?²�« nK� Ê√ v�≈ W?�U?{ùUÐ ÆÆ«c¼ ÆW?OJ?O½UJO?�Ëd?NJ�« ÆÆ UÐcÐc²�« Ác?N� œULš≈ „U?M¼ sJ¹ r� «–≈Ë Æ…b¹b'«
Ë√ Hall Sensors ¢‰u¼¢ U?ÝU?�??Š WDÝ«uÐ UL� ÆÆs�«e²�« „d×� W�dŠ ¡b³Ð UC¹√ ÂuI¹ œULšù«
Æ©µ® r�— qJý ≠ Sensorless UÝU?�Š ÊËbÐ s� WŽd?��« »«d²?�« bMŽË ÆU¹dOŁQð „d?;« ÊU� u� wÐU−M��« hHI�« Âu?I¹Ë ÆWK¹uÞ …d²H� dL²?�ð bI�
‰U:« l¹“uð Êu?J¹ YOŠË ÆÆw½U¦�« Ÿu?M�« w� U�√ »UD�√ v�≈ …—UŁù« —UOð qO�uð r²¹ ÆÆs�«e²�« WŽdÝ U?−?²M� Damping Winding œU?L?šù« nK� —ËbÐ
n�u²¹ v²Š »cÐc?²�« qIO� ÆÆWO�JŽ WOÐd?N� U�ËeŽ
ÊuJ¹ Ê√ sJL?O� ÆÆW?O?³O?ł Włu?� w�?OÞUMG*« ‰U?I*« w� U?N?MŽ UMLKJð w²?�« d¹–U?;UÐË „d?;«
Æb¹b'« —«dI²Ýô« l{u� bMŽ „d;« dI²�¹Ë
W�uEM0 Ë√ Scalar w¼U&ô« dOž rJײ�« W�uEM0 ÆoÐU��«
„d?×??� w� U?ŽUD� ©≤® r�— qJ?A�« `{u¹Ë
Damping œU?Lšù« nK� «—UÐ t?O� d?NEð s�«eð
End-Ring W¹U?NM�« W??IKŠ p�c?�Ë Winding Bars
ÆÆWOŠU½ s� UF� «—U³�« lO?Lł qO�u²Ð ÂuIð w²�«Ë
Èdš_« WO?ŠUM�« w� Èdš√ W¹UN½ WIK?Š błuð YOŠ
sŽ Y׳¹ „d;« Ê_ w¼ Hunt WLK�Ë Æ «—U³�« s�
œUDB¹ Ê√ ‰ËU?×¹ t½Q�Ë ÆÆ…b¹b?ł —«dI²?Ý« WDI½
UC¹√ …d¼U?E�« Ác¼ Àb% b�Ë Æ…b¹b?ł Ê«eð« WDI½
dOGð Ë√ ÆÆFault WOÐd?NJ�« WJ³A�« w� QD) W−?O²½
W−?O²½ Ë√ ÆÆ„d;« »UD�_ …—UŁù« —UOð w� wzU?−�
w� Cyclic Changes W?LE²M?� «d?O?Gð œu?łË
bI?H¹ b� ÆÆ…œU?(« ôU(« w�Ë ÆwJO½UJO?*« qL(«
b?�Ë ÆÆ Loss of Synchronizm s�«e?²�« „d?;«
ÆÆWOÐd?NJ�« WJ³A�« bN?ł w� »cÐcð v�≈ p�– ÍœR¹
ÆÆFlicker …¡U?{ù« w� »cÐcð …—u?� w� d?NE¹Ë
uC?F�« s� q� w� „d;« w� —UO?²�« …œU¹“ p�c�Ë
—«Ëb�« ¡e?'« w� »UD�_« U?HK�Ë Stator XÐU?¦�«
w�Ë Æ„d?;« …—«d?Š W?ł—œ w� ŸU?Hð—«Ë Rotor
UÐcÐc?²�« Ác¼ œœdð U?NO?� »d?²I¹ w²�« ôU?(«
Natural wFO?³D�« œœd²�« s� W?OJO½UJO?�ËdNJ�«
qL(«Ë „d?;« s� W½uJ*« W�uEMLK� Frequency
ÁcN� Magnificaiton rO?�Cð Àb?×¹ ÆÆwJO½UJO*«
WOJ?O½UJO� «œUN?ł≈ ÀËbŠ v�≈ ÍœR¹ U‡Ðc?Ðc²�«
„d??;« —u‡×??� v‡KŽ Mechanical Stresses