
Page 40 - Website 113
P. 40
bIF�« WD?I½ qÐUI� w� ÆÆ Remote Set Point bFÔÐ sŽ ÆRatio W³�M�« ULJײ�
ÆU¹Ëb¹ UND³{ r²¹ w²�« Local Set Point WOF{u*« s� U¼dO�uð »uKD*« ¡«eł_« Ÿu½ vKŽ ÆÆp�– bL²F¹Ë
ÆÆWłËœe� «—U�?� W�uEM� q¦9 ÆÆ…—uB�« Ác¼Ë U¹—Ëd??{ ÊuJ¹ ÆÆ ôU??(« iFÐ w�Ë ÆU??NM� q� q�u�« W?OKL?FÐ U?�U?š rJ×?²*« ÊuJ¹ U?�bMŽË
©Major rEŽ_«® Outer wł—U?)« —U�*« pK1 YO?Š ÊuJ¹ b� ULMOÐ ÆÆW¹«b³�« cM� rJײ�« WOKLŽ Ÿu½ nO�uð W¹œUL?²Žô« dŁQ?²ð ÆÆb¹d³ð qzU?Ý Ë√ —U�³K?� qBH�«Ë
q�_«® Inner wKš«b�« —U�*UÐ W½—UI?� ÆÆd³�_« …dDO��« 5F� rJײ� b?¹b% Èdš_« ôU(« w� ÊUJ�ù« w� w�Ozd�« Í“UG�« ÂULB�« ‰ULF²ÝUÐ rJײLK� W�Ë«b*«Ë
œ«d*« W?O?ŽUMB�« W?OKL?F�« Ê√ ÆÆ`{«u�« s�Ë Æ©Minor ÆcOHM²�« bMŽ WLN*UÐ ÂUOIK� bOŠË wJ� ÆÆSolenoid-Actuated w³�u� nK0 qL?F¹ Íc�«Ë
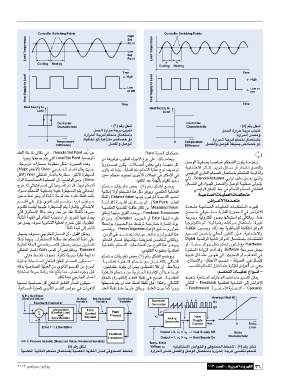
Ãdš t� wz«b²Ð« r�� v�≈ UNLO�Ið - b� ÆÆUNO� rJײ�« rJײ?� UIO?³Dð iFÐ ÆÆ©∏® r�— qJA�« `{u¹ qG?A*« v�≈ ¡«u?NK� qB?H�«Ë q�u�« W?OKL?Ž v�u?²¹
¡«u?Ý rJ×?²�« W?OKL?FÐ t?OKŽ …dDO?��« r²¹ wz«b?²Ð« WO½UJ�≈ ôË√ rJ×?²*« «c¼ q¦� d�u¹Ë Æw�JF�« W¹c?G²�« Æw�Ozd�« o�b²�« jš w� rJײ�« ÂULB� wzUAG�«
5F?� j/ o�Ë Ë√ W²ÐU?Ł WL?O� bMŽ t?OKŽ WE�U?;UÐ WDI½® Desired Value UN?O� »užd*« W?LO?I�« b¹b%
r�?I�« vKŽ dŁR¹ Íu½UŁ dš¬ r�?�Ë ÆÆtO?� »užd?� W‡ÝU?I*« W‡LO?I�« q³?I²?�¹ rŁ ÆÆ©Set Point b‡IF�«
Âu?I²� U?C¹√ UN?OKŽ …dDO?��« r²¹ …—UýSÐ wz«b?²Ðô« W?O�JF�« W¹c?G²�« W?�UÞ q�U½ s� Measured Value …œbF?²� W?OŽUMB�« U?OKLFK� U?LJײ?*« dNþ
w²�« —«dI²Ýô« W�UŠ bMŽË ÆbFÔÐ s� bIŽ WDIM� U¼—ËbÐ oKD¹® ULNMOÐ ‚dH�« œb×¹Ë ÆÆFeedback Transducer 5�L?š w�«uŠ cM?� W¹“UG�« …—uB?�« w� ÷«dž_«
W²ÐU¦�« WLOI�« v�≈ ÂUEM�« WÐU−²Ý« Ë√ ÆÆÃd)« UNO� qB¹ rŁ s�Ë ÆÆ©Deviation œu?O(« Ë√ Error QD)« t?OKŽ Wł—bÐË ÆWO½Ëd²J�« —uBÐ UN�«b³²Ý« - w�U²�UÐË ÆÆU�UŽ
u¼ qB¹ ·uÝ W¹u½U ?¦�« WOKLF�« Ãd?š ÊS� ÆÆWÐuKD*« WDÝ«uÐ œu?O?(« l� j?³ðdð W?ł—U?š …—U?ý≈ b�u¹ UOłu�uMJ²Ð rŁ ÆÆôË√ WOL�— U³�d ?� ‰ULF²ÝUÐ ÆÆ…dO³�
ÆW²ÐUŁ WLO� v�≈ dšü« sLC²¹Ë Æ Preset Algorithmœ«bŽù« oÐU?Ý Â“—«uš W?HKJ²�« V³?�ÐË Æp�– bFÐ W¹dþUM?²�« WK�UJ²*« dz«Ëb�«
dDO�¹ ·u?Ý wł—U)« —U?�*« Ê√ ÆƉuI�« sJ1Ë ÆÆs�e�« vKŽ b?L?²?Fð «—U?³Ž ÆÆ…œU?Ž “—«u?)« «c¼ rOL?Bð sLC?²¹ w�U(« —uD²�« ÊS?� ÆÆW¹œUL?²Žô«Ë
ö?� ULMO?Ð ÆÆ—«dI?²Ýô« W?�UŠ bMŽ rJ×?²�« W?�œ vKŽ ÆrJײ�« —U?�* UOJO?�UM¹œ UC¹u?Fð sLC²?ð w�U²�UÐË Digital WO?L�d�« W¹œU*« dz«Ëb�« ‰UL?F²ÝUÐ U?LJײ*«
…dÐUF�« W�U(« w� U�d ?B²�« Ê«œb×¹ ·uÝ s¹—U�*« W¹c?G²�UÐ rJ×?²�« ÆÆ UL?Jײ*« s� ŸuM�« «c¼ d?�u¹Ë Ë√ ÆÆW?³K� dz«ËbÐ q¦2 rJ% Êu½U?� l� Hardware
wKš«b�« —U�*« Gain V�� Ê√ ÷«d²�UÐË ÆTransient ÆÍbOKI²�« t�uNH0 WO�JF�« …dL²�*« …œU¹e�« œ√ b�Ë ÆSoftware W−�d?³� qL−Ð
∫wK¹U� kŠö½ ·u�� ÆÆWO�U� Wł—bÐ WO�UŽ WLO� t� rJײ?� UIO?³Dð iFÐ ©π® r�— qJA�« `{u¹Ë …b¹bŽ q�U?A� —u?Nþ v�« ÆÆY¹bײ�« Ë√ b?OI?F²�« w�
…dÐU?Ž WÐU−?²?Ý« wKš«b�« oKG*« —U?�LK� ÊuJO?Ý ≠ ÆW?O�JF�« W?¹cG?²�« rJ×?²� l� Ê«d?²?�ôUÐ w�U²?²�« ÆÆÕö�ù«Ë ≠‰UDŽ_« b¹b?% ≠ W½UOB�« ÆÆw� q¦?L²ð
tð«cÐ WO?ŽUMB�« WOKLF�« s� Íu½U¦�« r�?I�« s� ŸdÝ√ ÆÆ5NÐUA²� U½uJ¹ Ê√ V−¹ 5LJײ*« ö� Ê√ ÆÆkŠö½Ë ÆVÝUM*« rJײ*« —UO²š« bMŽ …dŁR*« q�«uF�« s� w¼Ë
WÐU−²Ý« WŽdÝ …œU¹“ tMŽ Z²M¹ U2 ÆÆ—U�*« œułË q³� W¹cG?²�« rJײ?� s� Wł—U?)« …—Uýù« Ê√ «b?Ž UL?O� ∫r‡‡Jײ�« U‡‡OKLŽ Ÿ«u‡‡½√ ≠
Æp�c� UF³ð wł—U)« —U�*« rJײ* ©…d?OG²*«® b?IF�« WDI½ w¼ `³Bð ÆÆW?O�JF�« …œbF²� WOŽUMB�« UOKL?F�« ULJײ� rO�Ið sJ1
UO³?�½ WOÝU�Š q�√ wKš«b�« o?KG*« —U�*« ÊuJOÝ ≠ UND³?{ r²¹ s� Ác¼ bI?F�« WDI½ ÊS� ÆÆ«cJ¼Ë Æw�U?²²�« w�U²²�« ≠ Feedback WO�JF�« W¹c?G²�« ∫v�≈ ÷«dž_«
ÆWOŽUMB�« WOKLFK� Íu½U¦�« r�I�« ’«uš w� «dOG²K� bIF�« WDI½ …œUŽ UN ?OKŽ oKD¹Ë ÆÆ…œUF�« dł UL� U¹Ëb¹ ≠ Feedforward W?O?�U?�_« W¹c?G?²�« ≠ Cascade